Trends
Robots Are Rising in Digital Printing
The use of robotic technology in the inkjet printing process could change the dynamic of decorating complex industrial components.
ROBOTS AND DIGITAL PRINTING have been aligned for some time. Walk around any large graphics show, like SGIA or FESPA, and you’ll typically find several examples of automated, robotic loading and unloading systems for increasing production on flatbed printers. Companies like HP and Inca Digital have been showing such systems for the past few years, and Mimaki has demonstrated how successfully incorporating inkjet printers into an automated production line can cut down on the time and manpower needed to complete a job. But what about using robotics in the actual inkjet printing process?
The Heidelberg Omnifire line is probably the best-known example of combining inkjet and robotics. Launched in 2015 at InPrint Munich, the OmniFire 250 and now the larger OmniFire 1000 have wowed crowds at tradeshows by printing onto a wide range of objects, such as suitcases, cycle helmets, and custom-decorated car parts. Another demonstration using robots was given by Industrial Inkjet (IIJ) at InPrint 2014 in Hannover, Germany, in which penholders were presented and rotated under the printhead by a 6-axis ABB robot. At InPrint 2016 in Milan, ProFactor, an Austrian automation expert, in collaboration with Ardeje, a French inkjet integrator, demonstrated the printing of a grass design on sport shoes. The process used ink-receptive 3D haptic coatings provided by the Chinese company Fujian Huafeng and inkjet inks from Tiger Coatings. The robot-assisted printing system was part of a nationally funded project called addmanu, which is an Austrian venture for research, development, and the implementation of additive manufacturing with more than 20 industry and university partners.
Not surprisingly, there are many confidential projects involving specialist integrators, such as Cyan-Tec (UK) and FPT-Robotik (Germany), combining their inkjet and robotics expertise to develop customized equipment for major international companies. In the US, Engineered Print Solutions (EPS), which is well-known for its product decoration systems, is also a distributor for Fanuc robots and has a number of inkjet development projects underway.
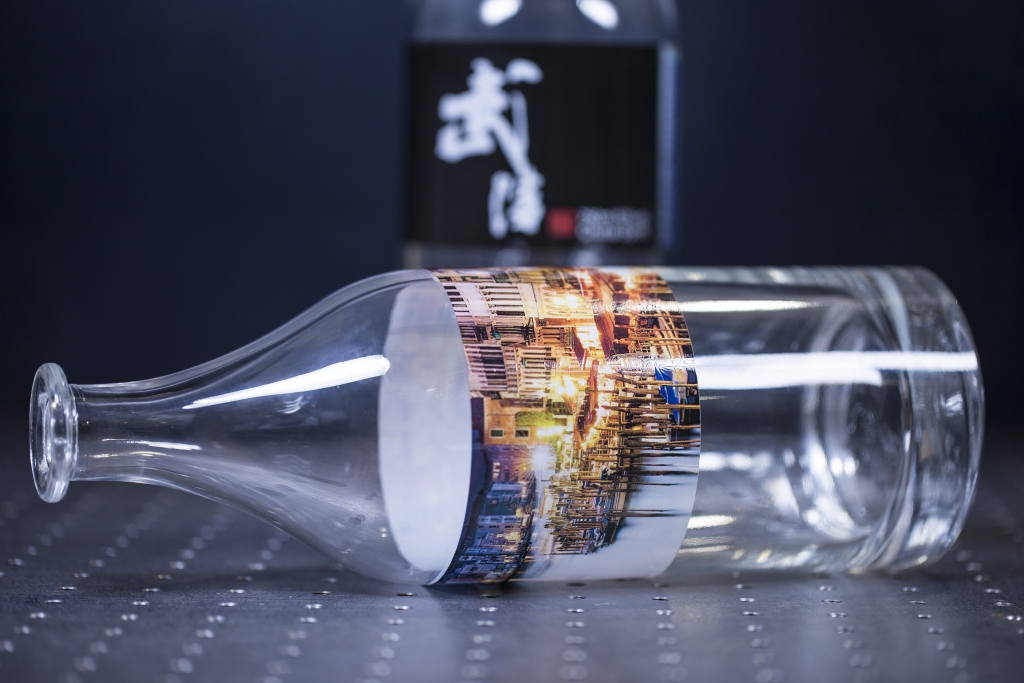
Using inkjet for product decoration is now well-established for tubes and conical shapes. The technology for wrapping an image around the complete cylinder or cone is understood and used by inkjet system manufacturers such as EPS, INX, Machines Dubuit, Martinenghi, and many more. The next step is to use robots to open up opportunities to decorate more complex, multidimensional products such as industrial components (car dashboards); retail products (motorcycle helmets); or even much larger structures. So far, most inkjet robotic systems are only partially decorating the object – other existing technologies offer full coverage.
Existing Technologies
Today, complex objects are typically decorated by IMD (in-mold decoration) or by decoration techniques such as dipped coatings, pad printing, heat transfer, decals, or hydrographic dipping.
AdvertisementIMD is a process of decorating injection-molded plastic parts or components. During the plastic injection-molding cycle, the decorated or patterned film becomes an integral part of the final product. The film is inserted in the open mold and held in place. When the mold is closed, plastic resin is injected into it, encapsulating the film permanently within the finished part. IMD requires good mold design and construction for accurate placement and reliability, and often employs robotic automation as part of the process. Advances in IMD technology now enable high-quality decoration across surfaces, regardless of texture, shape, or dimension. Developments in film technology enhance the formability, increase the depth and durability of the image, and prevent image distortion across complex curves.
With decals, a printed substrate is transferred to another surface upon contact, usually with the aid of heat or water. Decals can be used for items such as appliance instrument panels and can provide high-quality graphics on a wide range of materials.
Pad printing is also used to print onto irregular shapes, transferring a 2D image onto a 3D object via an indirect offset process. The image is transferred from the etched artwork (cliché) by a silicone pad onto the object. Pad printing is widely used for decorating objects such as golf balls, toys, medical devices, appliances, and control panels.
Hydrographic dipping, also known as immersion printing or water-transfer imaging, can be used on a range of materials including metal, plastic, and glass. A printed film is placed in water and a chemical activator is used to dissolve the film into a liquid and activate a bonding agent. The substrate is pretreated with a base coat and then lowered into the water through the floating ink layer, which wraps around and adheres to the substrate. A top coat is typically applied to enhance durability. This 360-degree-coverage process provides high image quality and substrate flexibility, and is used on many complex shapes – large and small – for full product decoration. Examples include car dashboards, motorbike gas tanks, and bike helmets.
In contrast to such 360-degree coverage, most of the robotic systems using inkjet today (those that are in the public domain) coat or decorate only a part of the multidimensional shape. Full wrapping or full-coverage printing of complex shapes represents the next challenge for inkjet.

Inkjet Printing Using Robotics
To achieve a full 360-degree-printed object, the first step is to create a 3D mesh of the shape. A 3D mesh is a collection of vertices, edges, and faces that provide a virtual description of the shape of a 3D object. For many products, this mesh will be available as an output of the CAD design process but if not, then 3D scanning technology is available.
The next step is texture mapping, which defines the surface texture or color information onto the 3D object. This is the technique that uses software to wrap the image to be printed over the whole object as part of the design process. A wide range of software tools are available to complete this step; many have been developed for the gaming and associated augmented reality industries. Or nonspecialist software programs like Photoshop can also wrap – or texture map – the image onto the shape.
Inkjet printheads each have a defined print width, or swath, so when considering how to print onto a 3D object, the print path for each object has to be defined. The challenge for the OEM or system integrator begins with how to “unwrap” the image and create the swaths in readiness for printing a particular object. Taking a sphere as an example, there are many ways to generate the swath decomposition. In each case, the choice of print path must consider the constraints of the object to be printed, the inkjet printheads, and the capability of the ro
ROBOTS AND DIGITAL PRINTING have been aligned for some time. Walk around any large graphics show, like SGIA or FESPA, and you’ll typically find several examples of automated, robotic loading and unloading systems for increasing production on flatbed printers. Companies like HP and Inca Digital have been showing such systems for the past few years, and Mimaki has demonstrated how successfully incorporating inkjet printers into an automated production line can cut down on the time and manpower needed to complete a job. But what about using robotics in the actual inkjet printing process?
The Heidelberg Omnifire line is probably the best-known example of combining inkjet and robotics. Launched in 2015 at InPrint Munich, the OmniFire 250 and now the larger OmniFire 1000 have wowed crowds at tradeshows by printing onto a wide range of objects, such as suitcases, cycle helmets, and custom-decorated car parts. Another demonstration using robots was given by Industrial Inkjet (IIJ) at InPrint 2014 in Hannover, Germany, in which penholders were presented and rotated under the printhead by a 6-axis ABB robot. At InPrint 2016 in Milan, ProFactor, an Austrian automation expert, in collaboration with Ardeje, a French inkjet integrator, demonstrated the printing of a grass design on sport shoes. The process used ink-receptive 3D haptic coatings provided by the Chinese company Fujian Huafeng and inkjet inks from Tiger Coatings. The robot-assisted printing system was part of a nationally funded project called addmanu, which is an Austrian venture for research, development, and the implementation of additive manufacturing with more than 20 industry and university partners.

Not surprisingly, there are many confidential projects involving specialist integrators, such as Cyan-Tec (UK) and FPT-Robotik (Germany), combining their inkjet and robotics expertise to develop customized equipment for major international companies. In the US, Engineered Print Solutions (EPS), which is well-known for its product decoration systems, is also a distributor for Fanuc robots and has a number of inkjet development projects underway.
Using inkjet for product decoration is now well-established for tubes and conical shapes. The technology for wrapping an image around the complete cylinder or cone is understood and used by inkjet system manufacturers such as EPS, INX, Machines Dubuit, Martinenghi, and many more. The next step is to use robots to open up opportunities to decorate more complex, multidimensional products such as industrial components (car dashboards); retail products (motorcycle helmets); or even much larger structures. So far, most inkjet robotic systems are only partially decorating the object – other existing technologies offer full coverage.
Existing Technologies
Today, complex objects are typically decorated by IMD (in-mold decoration) or by decoration techniques such as dipped coatings, pad printing, heat transfer, decals, or hydrographic dipping.
IMD is a process of decorating injection-molded plastic parts or components. During the plastic injection-molding cycle, the decorated or patterned film becomes an integral part of the final product. The film is inserted in the open mold and held in place. When the mold is closed, plastic resin is injected into it, encapsulating the film permanently within the finished part. IMD requires good mold design and construction for accurate placement and reliability, and often employs robotic automation as part of the process. Advances in IMD technology now enable high-quality decoration across surfaces, regardless of texture, shape, or dimension. Developments in film technology enhance the formability, increase the depth and durability of the image, and prevent image distortion across complex curves.
With decals, a printed substrate is transferred to another surface upon contact, usually with the aid of heat or water. Decals can be used for items such as appliance instrument panels and can provide high-quality graphics on a wide range of materials.
Pad printing is also used to print onto irregular shapes, transferring a 2D image onto a 3D object via an indirect offset process. The image is transferred from the etched artwork (cliché) by a silicone pad onto the object. Pad printing is widely used for decorating objects such as golf balls, toys, medical devices, appliances, and control panels.
Hydrographic dipping, also known as immersion printing or water-transfer imaging, can be used on a range of materials including metal, plastic, and glass. A printed film is placed in water and a chemical activator is used to dissolve the film into a liquid and activate a bonding agent. The substrate is pretreated with a base coat and then lowered into the water through the floating ink layer, which wraps around and adheres to the substrate. A top coat is typically applied to enhance durability. This 360-degree-coverage process provides high image quality and substrate flexibility, and is used on many complex shapes – large and small – for full product decoration. Examples include car dashboards, motorbike gas tanks, and bike helmets.
In contrast to such 360-degree coverage, most of the robotic systems using inkjet today (those that are in the public domain) coat or decorate only a part of the multidimensional shape. Full wrapping or full-coverage printing of complex shapes represents the next challenge for inkjet.
Inkjet Printing Using Robotics
To achieve a full 360-degree-printed object, the first step is to create a 3D mesh of the shape. A 3D mesh is a collection of vertices, edges, and faces that provide a virtual description of the shape of a 3D object. For many products, this mesh will be available as an output of the CAD design process but if not, then 3D scanning technology is available.
The next step is texture mapping, which defines the surface texture or color information onto the 3D object. This is the technique that uses software to wrap the image to be printed over the whole object as part of the design process. A wide range of software tools are available to complete this step; many have been developed for the gaming and associated augmented reality industries. Or nonspecialist software programs like Photoshop can also wrap – or texture map – the image onto the shape.
Inkjet printheads each have a defined print width, or swath, so when considering how to print onto a 3D object, the print path for each object has to be defined. The challenge for the OEM or system integrator begins with how to “unwrap” the image and create the swaths in readiness for printing a particular object. Taking a sphere as an example, there are many ways to generate the swath decomposition. In each case, the choice of print path must consider the constraints of the object to be printed, the inkjet printheads, and the capability of the robot. For example, the swath decomposition for a sphere could follow a latitude, a spiral, or a more freeform approach.
The selected print path must then be coordinated with the robot control and its positional capabilities. The precision with which industrial robots can commonly position objects is very good for mechanical processes such as spraying or welding, but is still an order of magnitude less accurate than that required to avoid visible artifacts in inkjet printing. Trade-offs in print quality are rarely acceptable, so software techniques are being developed to compensate for the inaccuracies in robotic registration. If the robotic capabilities are consistent, then they can be measured and compensated. There is also a difference between the accuracy achievable for static poses, when the robot is not moving, and what can be maintained dynamically while the robot is following a chosen print path.
Typically, robotic systems using inkjet will be custom built for specific applications by the system integrator. For every different object, the inkjet printing process needs to consider the geometry of each object, the geometry of every nozzle in the printhead, and the selected print path; and it must compensate for the density effects, optimize the screener for shape, and compensate for the behavior of the datapath.
The drop-laydown strategy is critical. This is the precise coordination of nozzle jetting with positional information of the printhead, all within the constraints, positional accuracy, and repeatability of the robot. Determining when to eject a drop is a challenge, and the key physical characteristics of the printhead (such as the print width, nozzle geometry, number of and distance between nozzle banks, drop size, jet straightness, and drop ejection velocity) have to be carefully considered and coordinated with the relative speed of the object’s movement at the point where the nozzle jets and the drop lands.
 Printing the image must take into account all these complexities and also lay down the swaths following the selected print path. Unlike flat surfaces where swaths lie parallel to each other, on complex shapes, the swaths may overlap or meet at an angle to each other. Stitching strategies must be employed to reduce the visibility of this issue. For some objects, the print path may be so complex that a swath may not only require stitching, but also density and nozzle position correction as it twists and turns relative to the surface. This especially applies to shapes with discontinuities in their curvature. In these applications, a whole myriad of issues occurs including density correction, dot gain, and screening artifacts.
Printing the image must take into account all these complexities and also lay down the swaths following the selected print path. Unlike flat surfaces where swaths lie parallel to each other, on complex shapes, the swaths may overlap or meet at an angle to each other. Stitching strategies must be employed to reduce the visibility of this issue. For some objects, the print path may be so complex that a swath may not only require stitching, but also density and nozzle position correction as it twists and turns relative to the surface. This especially applies to shapes with discontinuities in their curvature. In these applications, a whole myriad of issues occurs including density correction, dot gain, and screening artifacts.
These challenges may seem significant, but as we have experienced in many applications already, all the same compelling drivers to implement digital printing technology apply. This is what is driving development and innovation in the field of inkjet and robotics. What we see at tradeshows and conferences is just the smallest sneak peek at what is happening behind closed doors in companies and manufacturing plants worldwide. Although most inkjet robotic systems are being custom built to increase the efficiency of specific manufacturing processes, we can expect more widespread availability as companies such as Heidelberg, EPS, and others continue to invest in direct-to-shape technology and develop systems to make this capability available to printers. As we have seen so many times before, inkjet technology continues to break down technology barriers and open up new possibilities and new markets.
Read more from the October/November 2018 issue.
bot. For example, the swath decomposition for a sphere could follow a latitude, a spiral, or a more freeform approach.
The selected print path must then be coordinated with the robot control and its positional capabilities. The precision with which industrial robots can commonly position objects is very good for mechanical processes such as spraying or welding, but is still an order of magnitude less accurate than that required to avoid visible artifacts in inkjet printing. Trade-offs in print quality are rarely acceptable, so software techniques are being developed to compensate for the inaccuracies in robotic registration. If the robotic capabilities are consistent, then they can be measured and compensated. There is also a difference between the accuracy achievable for static poses, when the robot is not moving, and what can be maintained dynamically while the robot is following a chosen print path.
Typically, robotic systems using inkjet will be custom built for specific applications by the system integrator. For every different object, the inkjet printing process needs to consider the geometry of each object, the geometry of every nozzle in the printhead, and the selected print path; and it must compensate for the density effects, optimize the screener for shape, and compensate for the behavior of the datapath.
The drop-laydown strategy is critical. This is the precise coordination of nozzle jetting with positional information of the printhead, all within the constraints, positional accuracy, and repeatability of the robot. Determining when to eject a drop is a challenge, and the key physical characteristics of the printhead (such as the print width, nozzle geometry, number of and distance between nozzle banks, drop size, jet straightness, and drop ejection velocity) have to be carefully considered and coordinated with the relative speed of the object’s movement at the point where the nozzle jets and the drop lands.
Printing the image must take into account all these complexities and also lay down the swaths following the selected print path. Unlike flat surfaces where swaths lie parallel to each other, on complex shapes, the swaths may overlap or meet at an angle to each other. Stitching strategies must be employed to reduce the visibility of this issue. For some objects, the print path may be so complex that a swath may not only require stitching, but also density and nozzle position correction as it twists and turns relative to the surface. This especially applies to shapes with discontinuities in their curvature. In these applications, a whole myriad of issues occurs including density correction, dot gain, and screening artifacts.
These challenges may seem significant, but as we have experienced in many applications already, all the same compelling drivers to implement digital printing technology apply. This is what is driving development and innovation in the field of inkjet and robotics. What we see at tradeshows and conferences is just the smallest sneak peek at what is happening behind closed doors in companies and manufacturing plants worldwide. Although most inkjet robotic systems are being custom built to increase the efficiency of specific manufacturing processes, we can expect more widespread availability as companies such as Heidelberg, EPS, and others continue to invest in direct-to-shape technology and develop systems to make this capability available to printers. As we have seen so many times before, inkjet technology continues to break down technology barriers and open up new possibilities and new markets.
Let’s Talk About It
Creating a More Diverse and Inclusive Screen Printing Industry
LET’S TALK About It: Part 3 discusses how four screen printers have employed people with disabilities, why you should consider doing the same, the resources that are available, and more. Watch the live webinar, held August 16, moderated by Adrienne Palmer, editor-in-chief, Screen Printing magazine, with panelists Ali Banholzer, Amber Massey, Ryan Moor, and Jed Seifert. The multi-part series is hosted exclusively by ROQ.US and U.N.I.T.E Together. Let’s Talk About It: Part 1 focused on Black, female screen printers and can be watched here; Part 2 focused on the LGBTQ+ community and can be watched here.













Inkcups Announces New CEO and Leadership Restructure

Hope Harbor to Receive Donation from BlueCotton’s 2024 Mary Ruth King Award Recipient

Livin’ the High Life


Bulletins
Get the most important news and business ideas from Screen Printing magazine's news bulletin.
-
 Art, Ad, or Alchemy1 month ago
Art, Ad, or Alchemy1 month agoF&I Printing Is Everywhere!
-

 Case Studies1 month ago
Case Studies1 month agoHigh-Density Inks Help Specialty Printing Take Center Stage
-
 Andy MacDougall1 month ago
Andy MacDougall1 month agoFunctional and Industrial Printing is EVERYWHERE!
-

 Columns2 weeks ago
Columns2 weeks ago8 Marketing Mistakes Not to Make When Promoting Your Screen Printing Services Online
-
 Editor's Note2 weeks ago
Editor's Note2 weeks agoLivin’ the High Life
-

 Marshall Atkinson2 weeks ago
Marshall Atkinson2 weeks agoHow to Create a Winning Culture in Your Screen-Printing Business
-

 Thomas Trimingham2 months ago
Thomas Trimingham2 months ago“Magic” Marketing for Screen Printing Shops
-

 News & Trends1 month ago
News & Trends1 month agoWhat Are ZALPHAS and How Can You Serve Them in Your Print Business?